alla kategorier
-
Integrerade kretsar (ICs)
Integrerade kretsar (ICs)
- Gränssnitt - Sensor, Kapacitiv Touch(642)
- Specialiserade IC: er(12302)
- PMIC - Spänningsregulatorer - Speciellt syfte(5644)
- PMIC - spänningsregulatorer - linjära regulatorstyrare(793)
- PMIC - Spänningsregulatorer - Linjär + Växling(1829)
- PMIC - Spänningsregulatorer - Linjär(70981)
- PMIC - Spänningsregulatorer - DC DC -omkopplingsregulatorer(39569)
- PMIC - Spänningsregulatorer - DC DC -omkopplingskontroller(13507)
- PMIC - Spänningsreferens(9453)
- PMIC - V / F och F / V-omvandlare(145)
- PMIC - Termisk hantering(592)
- PMIC - Handledare(47946)
- PMIC - RMS till DC-omvandlare(170)
- PMIC - Strömförsörjning, monitorer(2104)
- PMIC - Power Over Ethernet (PoE) Controllers(1008)
- PMIC - Power Management - Specialiserad(7722)
- PMIC - Power Distribution Switches, Load Drivers(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ELLER Controllers, Ideal Diodes(705)
- PMIC - Motor Drivers, Controllers(4712)
- PMIC - Belysning, Ballast Controllers(560)
- PMIC - LED-drivrutiner(7282)
- PMIC - laserskrivare(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - Gate Drivers(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Energimätning(654)
- PMIC - Display Drivers(1435)
- PMIC - Nuvarande Förordning / Förvaltning(1481)
- PMIC - Batteristyrning(5553)
- PMIC - Batteriladdare(3831)
- PMIC - AC DC-omvandlare, offline switchare(4905)
- Memory - Controllers(358)
- Minne - Konfiguration Proms för FPGA(639)
- Minne - Batterier(13)
- Minne(65694)
- Logik - Universella bussfunktioner(706)
- Logik - Translators, Level Shifters(2854)
- Logik - Speciallogik(1870)
- Logic - Signal Switches, Multiplexers, Decoders(9420)
- Logic - Shift Registers(2665)
- Logik - Paritetsgeneratorer och Checkers(335)
- Logik - Multivibratorer(831)
- Logik - Spärrar(3658)
- Logik - grindar och inverterare - Multifunktion, konfigurerbar(1687)
- Logik - Gates och växelriktare(16453)
- Logik - Flip Flops(7780)
- Logik - FIFO-minne(4240)
- Logik - räknare, uppdelare(3456)
- Logik - Komparatorer(592)
- Logik - buffertar, drivrutiner, mottagare, sändtagare(17835)
- Lineär - Videobehandling(2909)
- Linjär - Jämförare(5084)
- Lineära - Analoga Multiplikatorer, Dividers(263)
- Linjär - förstärkare - Videoförstärkare och moduler(1905)
- Linjär - Förstärkare - Särskilt ändamål(1856)
- Linjär - förstärkare - instrumentering, OP -förstärkare, buffertförstärkare(34236)
- Linjär - Förstärkare - Ljud(4567)
- Gränssnitt - Röstinspelning och uppspelning(556)
- Gränssnitt - Uarts (Universal Asynchronous Mottagare sändare)(1237)
- Gränssnitt - Telekom(4467)
- Gränssnitt - Specialiserat(4833)
- Gränssnitt - Signal Terminatorer(333)
- Gränssnitt - Signalbuffertar, repeater, delare(1449)
- Gränssnitt - Serializers, Deserializers(1480)
- Gränssnitt - Sensor- och detektorgränssnitt(1524)
- Gränssnitt - Moduler(169)
- Gränssnitt - Modem - IC och moduler(407)
- Gränssnitt - I / O-utbredare(1136)
- Gränssnitt - Filter - Aktiv(1226)
- Gränssnitt - Kodare, avkodare, omvandlare(714)
- Gränssnitt - drivrutiner, mottagare, sändtagare(20755)
- Gränssnitt - Direct Digital Synthesis (DDS)(117)
- Gränssnitt - Controllers(3628)
- Gränssnitt - CODECs(1676)
- Gränssnitt - analoga switchar, multiplexer, demultiplexers(12567)
- Gränssnitt - analoga switchar - speciellt syfte(2533)
- Embedded - System On Chip (SoC)(4496)
- Inbäddad - PLD (Programmerbar logisk enhet)(971)
- Inbäddad - Mikroprocessorer(10083)
- Inbäddad - Mikrokontroller - Applikationsspecifik(2275)
- Inbäddad - Mikrokontrollatorer(99285)
- Inbäddad - Mikrokontroller, mikroprocessor, FPGA -moduler(1527)
- Inbäddad - FPGAS (fältprogrammerbar grindarray) med mikrokontroller(81)
- Inbäddad - FPGA (Field Programmable Gate Array)(27747)
- Inbäddad - DSP (Digital Signal Processors)(4081)
- Embedded - CPLDS (komplexa programmerbara logikenheter)(5187)
- Datainsamling - Touch Screen Controllers(1210)
- Datainsamling - Digital till analoga omvandlare (DAC)(14419)
- Datainsamling - Digitala potentiometrar(6250)
- Dataförvärv - Analog till Digital Converters (ADC)(17776)
- Data Acquisition - Analog Front End (AFE)(787)
- Datainsamling - ADC / DAC - Särskilt syfte(3043)
- Klocka / Timing - Realtidsklockor(2446)
- Klocka/timing - programmerbara timers och oscillatorer(23469)
- Klocka / Timing - IC-batterier(4)
- Klocka / Timing - Delay Lines(1049)
- Klocka/timing - Klockgeneratorer, PLL: er, frekvenssyntesizers(32775)
- Klocka / Timing - Klockbuffertar, Drivrutiner(4568)
- Klocka / Timing - Application Specific(8652)
- Ljud speciellt syfte(1564)
Relevant tillverkare







-
Diskreta halvledarprodukter
Diskreta halvledarprodukter
- Aktuell reglering - dioder, transistorer(1090)
- Transistorer - Särskilt ändamål(226)
- Transistorer - Programmerbar Unijunction(48)
- Transistorer - JFETs(1558)
- Transistorer - IGBT - Single(4799)
- Transistorer - IGBT-moduler(63420)
- Transistorer - IGBT - Arrays(26)
- Transistorer - FET, MOSFET - Single(48330)
- Transistorer - FET, MOSFET - RF(4903)
- Transistorer - FET, MOSFET - Arrays(6641)
- Transistorer - Bipolar (BJT) - Singel, förspänd(4539)
- Transistorer - Bipolär (BJT) - Singel(25800)
- Transistorer - Bipolär (BJT) - RF(2087)
- Transistorer - Bipolar (BJT) - Matriser, förspänd(2115)
- Transistorer - Bipolär (BJT) - Arrays(2310)
- Tyristorer - TRIACs(4044)
- Thyristors - SCRs - Moduler(3967)
- Tyristorer - SCR(5436)
- Thyristorer - DIACs, SIDACs(319)
- Drivrutinsmoduler(1627)
- Dioder - Zener - Single(87483)
- Dioder - Zener - Arrays(2619)
- Dioder - Variabel kapacitans (varicaps, varaktorer)(1200)
- Dioder - RF(2753)
- Dioder - Rectifiers - Single(67528)
- Dioder - Likriktare - Arrays(20581)
- Dioder - Bridge Likriktare(11700)
Relevant tillverkare




-
RF / IF och RFID
RF / IF och RFID
- Abonnent Identification Module (SIM) -kort(77)
- RF -cirkulatorer och isolatorer(1742)
- RFID, RF Access, Monitoring ICs(1550)
- RFID Transponders, Tags(747)
- RFID-läsarmoduler(464)
- RFID -utvärdering och utvecklingssatser, styrelser(30)
- RFID antenner(329)
- RFI och EMI - Skärmning och absorberande material(6444)
- RFI och EMI - Kontakter, finger och packningar(7497)
- RF-sändare(668)
- RF Transceiver Moduler(6900)
- RF Transceiver ICs(4169)
- RF-omkopplare(9276)
- RF-sköldar(16401)
- RF-mottagare(1998)
- RF -mottagare, sändare och sändtagare färdiga enheter(2763)
- RF Power Dividers / Splitters(1223)
- RF Power Controller ICs(86)
- RF-modulatorer(710)
- RF mixers(2800)
- RF olika IC och moduler(3276)
- RF Front End (LNA + PA)(419)
- RF -utvärdering och utvecklingssatser, styrelser(747)
- RF riktningskopplare(2718)
- RF Diplexerare(1464)
- RF-detektorer(412)
- RF-demodulatorer(249)
- RF-antenner(12319)
- RF förstärkare(19651)
- balun(1496)
- dämpare(4852)
Relevant tillverkare







-
optoelektronik
optoelektronik
- Optomekanisk(480)
- Belysningsarmaturer(125)
- Laserdioder, lasermoduler - Laserleverans, laserfibrer(345)
- Hene lasersystem(31)
- Hene laserhuvuden(27)
- Visa bakgrundsbelysningar(93)
- Xenon Lighting(387)
- Pekskärm överlagringar(453)
- Panelindikatorer, Pilotljus(75729)
- Optik - Fjärrfosfor Ljuskälla(269)
- Optik - Reflektorer(665)
- Optik - Ljusrör(5384)
- Optik - Linser(4951)
- LED - Spacers, Standoffs(2718)
- LED-lampor - Lampbyte(29718)
- LED - Circuit Board -indikatorer, matriser, lätta staplar, stapeldiagram(9083)
- LED-termiska produkter(667)
- LED-ljuskit(64)
- LED-belysning - Vit(37580)
- LED-belysning - Färg(4728)
- LED-belysning - COB, motorer, moduler(28735)
- LED Indikering - Diskret(27601)
- Laserdioder, moduler(1553)
- Lampor - Incandescents, Neons(311004)
- Lampor - Cold Cathode fluorescerande (CCFL) & amp;Uv(164)
- Växelriktare(7728)
- Infraröd, UV, Synliga Emitterare(3871)
- Fiber Optics - Sändare - Drive Circuitry Integrated(4085)
- Fiberoptik - Sändare - Diskret(350)
- Fiberoptik - Transceiver Moduler(18758)
- Fiberoptik - Switches, Multiplexers, Demultiplexers(1387)
- Fiberoptik - Mottagare(695)
- Fiberoptik - Attenuatorer(654)
- elektroluminescent(102)
- Display, Monitor - Interface Controller(98)
- Displaymoduler - Vakuumfluorescerande (VFD)(249)
- Display Modules - LED Dot Matrix och Cluster(865)
- Displaymoduler - LED-tecken och numerisk(5421)
- Displaymoduler - LCD, OLED, Grafisk(4654)
- Displaymoduler - LCD, OLED-tecken och numerisk(2202)
- Displaybitar, linser(88)
- Adresserbar, specialitet(458)
Relevant tillverkare







-
Givare, Givare
Givare, Givare
- Ultraljudsmottagare, sändare - Industrial(115)
- Temperatursensorer - Termostater - Mekanisk - Industrial(3103)
- Temperatursensorer - analog och digital utgång - Industrial(209)
- Närhetssensorer - industri(13611)
- Trycksensorer, givare - Industrial(26503)
- Optiska sensorer - Fotonik - räknare, detektorer, SPCM (Single Photon Counting Module)(751)
- Optiska sensorer - kameramoduler(875)
- Magnetiska sensorer - Position, närhet, hastighet (moduler) - Industrial(554)
- Force Sensors - Industrial(346)
- Flödessensorer - industri(151)
- Flottör, nivå sensorer - industriell(310)
- Kodare - industri(4980)
- Färgsensorer - Industrial(50)
- Tryck på sensorer(100)
- Ultraljudsmottagare, sändare(2421)
- Temperaturgivare - Termostater - Solid State(1096)
- Temperaturgivare - Termostater - Mekanisk(3397)
- Temperaturgivare - Termoelement, temperaturprober(1921)
- Temperatursensorer - RTD (motståndstemperaturdetektor)(1525)
- Temperaturgivare - PTC-termistorer(2273)
- Temperaturgivare - NTC-termistorer(13259)
- Temperatursensorer - Analog och digital utgång(3928)
- Strain Gauges(1399)
- Specialiserade sensorer(1861)
- Solceller(503)
- Shock Sensors(84)
- Sensor Interface - Junction Blocks(2519)
- Sensorkabel - Montering(22011)
- Proximity / Occupancy Sensors - Färdiga enheter(725)
- Närhetssensorer(2860)
- Tryckgivare, Givare(11317)
- Positionsensorer - Vinkel, linjär positionsmätning(6022)
- Optiska sensorer - Reflekterande - Logisk utgång(194)
- Optiska sensorer - reflekterande - analog utgång(432)
- Optiska sensorer - Fototransistorer(1027)
- Optiska sensorer - fotoporters - slottyp - transistorutgång(1427)
- Optiska sensorer - fotoporters - slottyp - logikutgång(1215)
- Optiska sensorer - Fotoelektriska, industriella(16763)
- Optiska sensorer - Fotodioder(1543)
- Optiska sensorer - Fotor detektorer - fjärrmottagare(2605)
- Optiska sensorer - Fotor detektorer - logikutgång(146)
- Optiska sensorer - Bilddetektorer - CdS-celler(74)
- Optiska sensorer - Avståndsmätning(377)
- Optiska sensorer - omgivande ljus, IR, UV -sensorer(1305)
- Multifunktions(558)
- Rörelsesensorer - Vibration(337)
- Rörelsesensorer - Tiltväxlar(67)
- Rörelsesensorer - Optisk(719)
- Rörelsesensorer - Inclinometrar(175)
- Rörelsessensorer - IMU (tröghetsmätningsenheter)(416)
- Motion Sensors - Gyroskop(214)
- Rörelsesensorer - Accelerometrar(1911)
- Magneter - Sensor Matchad(119)
- Magneter - Multi Purpose(1965)
- Magnetiska sensorer - Omkopplare (Solid State)(3700)
- Magnetiska sensorer - position, närhet, hastighet (moduler)(5199)
- Magnetiska sensorer - Linjär, Kompass (IC)(1247)
- Magnetiska sensorer - kompass, magnetfält (moduler)(35)
- LVDT -givare (linjär variabel differentiell transformator)(204)
- IrDA Transceiver Modules(196)
- Bildsensorer, kamera(2235)
- Fuktighet, fuktgivare(1425)
- Gas sensorer(1217)
- Force Sensors(188)
- Flödesgivare(550)
- Float, Level Sensors(1343)
- kodare(6357)
- Dammsensorer(43)
- Aktuella givare(3455)
- Färggivare(85)
- Förstärkare(1905)
Relevant tillverkare







-
Kontakter, förbindelser
Kontakter, förbindelser
- USB, DVI, HDMI -kontakter(446)
- Solid State Lighting -kontakter(555)
- Uttag för ICS, transistorer(953)
- Pluggbara kontakter(1221)
- Fotovoltaic (solpanel) kontakter(136)
- Fiberoptiska kontakter(370)
- FFC, FPC (platt flexibla) kontakter(761)
- D-sub, D-formade kontakter(2887)
- Koaxiella kontakter (RF)(2389)
- Cirkulära kontakter(14162)
- Kraftanslutningar av bladtyp(273)
- Pluggar och behållare(2597)
- USB, DVI, HDMI-kontakter - Adaptrar(572)
- USB, DVI, HDMI -kontakter(4298)
- Terminaler - Wire to Board-kontakter(217)
- Terminaler - Wire Splice Connectors(4322)
- Terminaler - Wire Pin Connectors(328)
- Terminaler - Turretkontakter(1273)
- Terminaler - Specialiserade kontakter(2042)
- Terminaler - Spadkontakter(3902)
- Terminaler - Löddarmkontakter(345)
- Terminaler - Skruvkontakter(745)
- Terminaler - Ringkontakter(12596)
- Terminaler - Rektangulära kontakter(4747)
- Terminaler - Snabbkopplingar, snabbkopplingar(8514)
- Terminaler - PC-pin, enkla postkontakter(3776)
- Terminaler - PC Pin-mottagare, uttagskontakter(5883)
- Terminaler - Magnetiska trådkontakter(1653)
- Terminaler - Knivkontakter(112)
- Terminaler - Höljen, Stövlar(2850)
- Terminaler - Foliekontakter(108)
- Terminaler - Barrel, Bullet Connectors(1107)
- Terminaler - Adaptrar(137)
- Terminal Strips och Turret Boards(1159)
- Terminalkopplingssystem(2533)
- Terminalblock - Wire to Board(43615)
- Terminalblock - Specialiserad(3722)
- Terminalblock - Strömfördelning(847)
- Plintblock - Panelmontering(1359)
- Terminalblock - Gränssnittsmoduler(1819)
- Terminalblock - Huvud, Pluggar och Sockets(119920)
- Terminalblock - Din Rail, Channel(9373)
- Terminalblock - Kontakter(65)
- Terminalblock - Barriärblock(47517)
- Terminalblock - Adaptrar(1059)
- Solid State Lighting Connectors - Kontakter(271)
- Solid State Lighting -kontakter(1344)
- Socklar för IC, Transistorer - Adaptrar(275)
- Uttag för ICS, transistorer(22148)
- Shunts, Jumpers(907)
- Rektangulära kontakter - Fjäderbelastad(7721)
- Rektangulära kontakter - höljen(43023)
- Rektangulära kontakter - Headers, Special Pin(6129)
- Rektangulära kontakter - rubriker, behållare, kvinnliga uttag(229601)
- Rektangulära kontakter - Headers, Male Pins(543338)
- Rektangulära kontakter - Gratis hängning, panelmontering(30142)
- Rektangulära kontakter - kontakter(10681)
- Rektangulära kontakter - ombord i, direkt ledning till ombord(2432)
- Rektangulära kontakter - Adaptrar(475)
- Rektangulär - Board to Board -kontakter - rubriker, behållare, kvinnliga uttag(9)
- Rektangulär - Board to Board -kontakter - rubriker, manliga stift(2)
- Rektangulära kontakter - Brädavstånd, Stackers (Board to Board)(238901)
- Rektangulära kontakter - matriser, kanttyp, mezzanin (styrelse till ombord)(37853)
- Strömuttagskontakter - Inlopp, utlopp, moduler(10310)
- Pluggbara kontakter(6049)
- Fotovoltaiska (Solar Panel) kontakter - kontakter(77)
- Fotovoltaic (solpanel) kontakter(504)
- Modulära kontakter - Wiring Blocks(99)
- Modulära kontakter - kontakter(1674)
- Modulära kontakter - Plug-höljen(181)
- Modulära kontakter - Jacks With Magnetics(10152)
- Modulära kontakter - Jackar(23416)
- Modulära kontakter - Adaptrar(855)
- Minneskontakter - PC-kort - Adaptrar(21)
- Minneskontakter - PC-kortuttag(3299)
- Minneskontakter - Inline Module Sockets(3390)
- LGH-kontakter(764)
- Keystone - Inserts(2758)
- Keystone - Frontplattor, ramar(1926)
- Heavy Duty Connectors - Inlägg, moduler(4190)
- Tunga kontaktdon - höljen, huvarna, baserna(17226)
- Tunga kontaktdon - ramar(523)
- Heavy Duty Connectors - Kontakter(1832)
- Tunga anslutningar - Assemblies(671)
- Fiberoptiska kontakter - höljen(919)
- Fiberoptiska kontakter - Adaptrar(4455)
- Fiberoptiska kontakter(3001)
- FFC, FPC (Flat Flexible) kontakter - höljen(652)
- FFC, FPC (Flat Flexible) kontakter - kontakter(202)
- FFC, FPC (platt flexibla) kontakter(18691)
- D-Sub, D-formade kontakter - Terminatorer(47)
- D-Sub, D-formade kontakter - Höljen(12238)
- D-Sub, D-Shaped Connectors - Kontakter(2714)
- D-Sub, D-Shaped Connectors - Backshells, Hoods(5995)
- D-Sub, D-formade kontakter - Adaptrar(1304)
- D-Sub-kontakter(141346)
- D-formade kontakter - Centronics(8770)
- Kontakter, fjäderbelastad och tryck(630)
- Kontakter - Multi Purpose(6196)
- Kontakter - Ledarram(122)
- Koaxialkontakter (RF) - Terminatorer(1231)
- Koaxialkontakter (RF) - Kontakter(480)
- Koaxialkontakter (RF) - Adaptrar(6386)
- Koaxiella kontakter (RF)(25734)
- Cirkulära kontakter - höljen(441226)
- Cirkulära kontakter - kontakter(4737)
- Cirkelkontakter - Backshells och kabelklemmer(53692)
- Cirkulära kontakter - Adaptrar(8839)
- Cirkulära kontakter(1196254)
- Card Edge Connectors - Höljen(469)
- Card Edge-kontakter - Edgeboard-kontakter(672683)
- Card Edge Connectors - Kontakter(325)
- Card Edge Connectors - Adaptrar(73)
- Baktyp Strömkontakter - Höljen(837)
- Blade Typ Strömkontakter - Kontakter(393)
- Kraftanslutningar av bladtyp(4163)
- Mellan serieadaptrar(649)
- Fat - strömkontakter(935)
- Fat - ljudkontakter(2432)
- Fat - ljudadaptrar(92)
- Banan och stickkontakter - Jackar, pluggar(1644)
- Banan och tipskontakter - Bindande inlägg(239)
- Banan och tipskontakter - Adaptrar(75)
- Bakplansanslutningar - Specialiserad(45586)
- Bakplansanslutningar - höljen(6863)
- Bakplansanslutningar - Hårdmetrisk, Standard(6297)
- Bakplansanslutningar - DIN 41612(9408)
- Backplane Connectors - Kontakter(3583)
- Bakplansanslutningar - ARINC Inserts(2357)
- Bakplansanslutningar - ARINC(3789)
Relevant tillverkare







-
Motstånd
-
kondensatorer
kondensatorer
- Aluminiumelektrolytkondensatorer(16817)
- Trimmare, Variabel Kondensatorer(3151)
- Tunna filmkondensatorer(3473)
- Tantalkondensatorer(136103)
- Tantal - Polymerkondensatorer(9778)
- Silikonkondensatorer(320)
- Niobiumoxidkondensatorer(330)
- Glimmer och PTFE kondensatorer(9101)
- Filmkondensatorer(150406)
- Elektriska dubbelskiktskondensatorer (EDLC), superkondensatorer(2782)
- Keramiska kondensatorer(833829)
- Kondensatornätverk, Arrays(2383)
- Aluminiumelektrolytkondensatorer(125325)
- Aluminium - Polymerkondensatorer(7544)
Relevant tillverkare






-
transformers
-
isolatorer
-
Kristaller, Oscillatorer, Resonatorer
Kristaller, Oscillatorer, Resonatorer
Relevant tillverkare






-
Växlar
Växlar
- Sammankopplingar(2893)
- Emergency Stop (e-stop) switchar(1160)
- Kabelbrytare(571)
- Växla omkopplare(33608)
- Fyrhjulsomkopplare(742)
- Taktila omkopplare(14263)
- Snap Action, Limit Switches(28077)
- Slide Switches(5166)
- Väljarknappar(9720)
- Rotary Switches(13850)
- Vridbrytare(53790)
- Tryckknappar - Hall Effect(127)
- Tryckknappar(190826)
- Programmerbara bildskärmar(39)
- Navigationsbrytare, joystick(1882)
- Magnetiska, Reed Switches(1399)
- Knappsatsbrytare(637)
- Tangentlåsbrytare(3684)
- DIP-omkopplare(7747)
- Konfigurerbara switchkomponenter - objektiv(1435)
- Konfigurerbara strömställare - Belysningskälla(1236)
- Konfigurerbara switchkomponenter - kontaktblock(1401)
- Konfigurerbara Switch Komponenter - Body(16077)
- Koppla ur strömbrytarkomponenterna(2567)
Relevant tillverkare






-
reläer
reläer
- Säkerhetsreläer(1310)
- Reed reläer(1735)
- Högfrekventa (RF) reläer(1190)
- Contactors (Solid State)(686)
- Kontaktorer (elektromekaniska)(11952)
- Bilreläer(1881)
- Solid State Relays(10652)
- Signalreläer, upp till 2 ampere(9149)
- Relä Sockets(2075)
- Strömreläer, över 2 ampere(31604)
- I / O-relämoduler(712)
- I / O-relämoduler - Input(2)
- I / O-relämodulställningar(247)
Relevant tillverkare























Välj språk
Aktuellt språk
Svenska
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
IR2110-Baserad Högfrekvent Omformardesign och Implementering
Tid: 2026/06/10
Bläddra: 188
En högfrekvent omformare är en viktig krets som används för att omvandla DC-effekt till AC-effekt för elektroniska och kraftkontrollapplikationer. I denna design spelar IR2110-drivrutinen en nyckelroll eftersom den tillåter kontrollkretsen att driva högsida- och lågsida MOSFET:er på ett säkert och effektivt sätt. Denna artikel förklarar designen och implementeringen av en IR2110-baserad högfrekvent omformare på ett praktiskt sätt. Den täcker systemstrukturen, IR2110-drivrutinsverksamhet, PIC16F716 mikrokontrollerkontroll, PWM-signalgenerering, fullbro MOSFET-brytning, utgångsfiltrering och skyddsmetoder.
Katalog
IR2110 Drivrutinscircuit
Översikt över Högfrekvent Omformarsystem
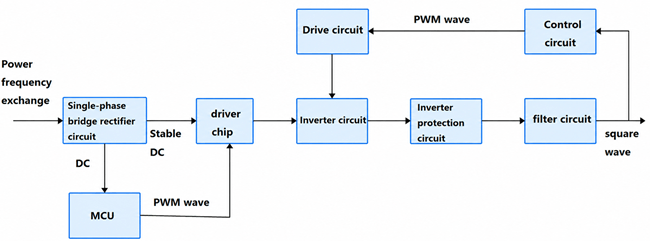
Figuren nedan visar den övergripande strukturen av högfrekvent omformarsystem. Effektflödet börjar från AC-ingången, som först skickas till en enfasbrorectifier. Rectifiern omvandlar AC-ingången till DC-spänning, vilket bildar DC-bussen som förser omformarens effektsteg.
Efter likriktning förser DC-bussen också regulatorcircuiten. Dessa regulatorer ger stabila 15 V och 5 V utgångar för kontroll- och drivrutinssektionerna. Den 15 V-försörjningen används vanligtvis av grinddrivningssteget, medan 5 V-försörjningen används av mikrokontrollern och andra lågspänningskontrollcircuit.
Drivrutinssteget fungerar som länken mellan kontrollkretsen och effektomkopplingssteget. Det förstärker kontrollsignalerna och ger den korrekta grinddrivningsnivån som behövs av MOSFET:erna. Detta möjliggör för omformarsteget att effektivt växla DC-bussens spänning och omvandla den till en högfrekvent AC-vågform.
Systemdesignschema
Omformarsteget är den huvudsakliga kraftöverföringssektionen av systemet. Det använder de drivna MOSFET:erna för att ändra DC-försörjningen till en växelström. Eftersom växlingsprocessen skapar högfrekventa komponenter och elektriskt brus, passerar utgången genom en filterkrets innan den når lasten. Filtret hjälper till att minska harmoniska störningar och förbättra kvaliteten på utgångsvågformen.
Systemet inkluderar också en skyddssteg för att förbättra säkerhet och pålitlighet. Denna steg hjälper till att upptäcka onormala förhållanden som överström, kortslutning eller instabil drift. När ett fel upptäckts kan skyddscircuiten begränsa eller stoppa driften för att förhindra skador på kraftkomponenterna.
En feedbackslöpp används för att övervaka utgångstillståndet och stödja stabil drift. Genom att mata tillbaka utgångsinformation till kontrollsektionen kan systemet
IR2110 Omformar Hårdvarudesign
Hårdvarudesignen av omriktaren är byggd runt två huvudkontrollkomponenter: IR2110 MOSFET-drivrutinskretsen och PIC16F716 mikrokontrollerkretsen. Mikrokontrollern genererar PWM-kontrollsignaler, medan IR2110 ökar dessa signaler till den rätta nivå för gate-drivkraft som krävs för att växla ström-MOSFET:arna. Tillsammans gör dessa kretsar det möjligt för omriktaren att omvandla likström till en kontrollerad växelström utgång.
IR2110 Drivchip
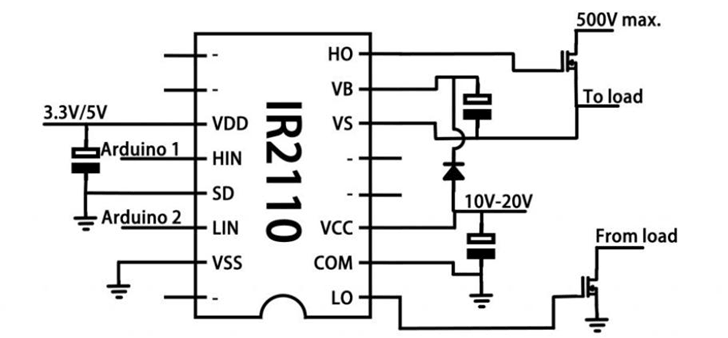
IR2110 är en hög-sida och låg-sida MOSFET-drivare som vanligtvis används i omriktarkretsar, motorstyrningar, omkopplingskraftförsörjningar och andra energikonverteringssystem. Den utvecklades ursprungligen av International Rectifier, som nu är en del av Infineon Technologies. Enheten är användbar eftersom den kan driva både de övre och nedre MOSFET:arna i en halvbrokrets.
I denna omriktardesign tar IR2110 emot lågspänning PWM-signaler från mikrokontrollern och omvandlar dem till starkare gate-drivsignaler för MOSFET:arna. Detta är viktigt eftersom en mikrokontrollerpinne inte kan driva ström-MOSFET-gate direkt i en högspänningsomriktarskede. MOSFET:arna behöver tillräcklig gate-spänning och snabb växelkraft för att slå på och av effektivt.
IR2110 inkluderar logikinputkontroll, nivånivellering, hög-sida utdata, låg-sida utdata och undervoltageskydd. Dess nivånivelleringsfunktion gör att hög-sida MOSFET-gaten kan drivas även när MOSFET-källa terminalen stiger med växelnoden. Detta gör enheten lämplig för bro-omriktarkretsar där den övre MOSFET-källan inte är fixerad till jord.
Arbetsprincip för IR2110-drivare
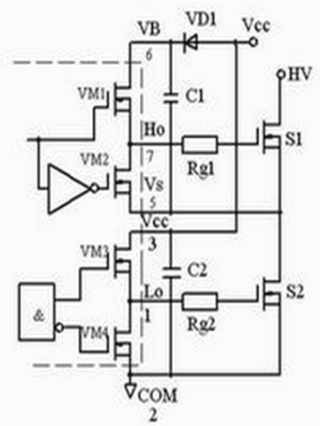
Kretsen nedan inkluderar en bootstrap-diod VD1, en bootstrap-kondensator C1, en försörjningsfilterkondensator C2, och två externa MOSFET:ar märkta S1 och S2. Den hög-sida utgången HO driver gaten för den övre MOSFET S1, medan den låg-sida utgången LO driver gaten för den nedre MOSFET S2.
Bootstrap-kretsen används för att skapa den flytande försörjningen som behövs för hög-sida drivrutinen. När den nedre MOSFET S2 är påslagen, dras växelnoden nära jord. Under denna tid laddas bootstrap-kondensatorn C1 från VCC genom bootstrap-dioden VD1. När C1 är laddad kan den försörja hög-sida drivrutinen när S1 behöver slå på.
IR2110 Halvbrodrivarkrets
När den hög-sida ingångssignalen är aktiv, använder IR2110 den lagrade laddningen i C1 för att höja gate-spänningen för S1 ovanför dess källa-spänning. Detta gör att den övre MOSFET kan slås på ordentligt. När den hög-sida signalen tas bort, urladdas gate-laddningen av S1 genom drivruttvägen, och stänger S1.
Den låg-sida MOSFET S2 styrs av LO-utgången. När den låg-sida ingången är aktiv, driver LO gaten för S2 och slår på den. Den hög-sida och låg-sida MOSFET:arna får inte slå på samtidigt eftersom detta skulle skapa skottflöde, där strömmen flödar direkt från den högspännings DC-bussen till jord. För att förhindra detta måste kontrollprogrammet införa en kort död tid mellan växlingen av S1 och S2.
IR2110 Omriktarkrets
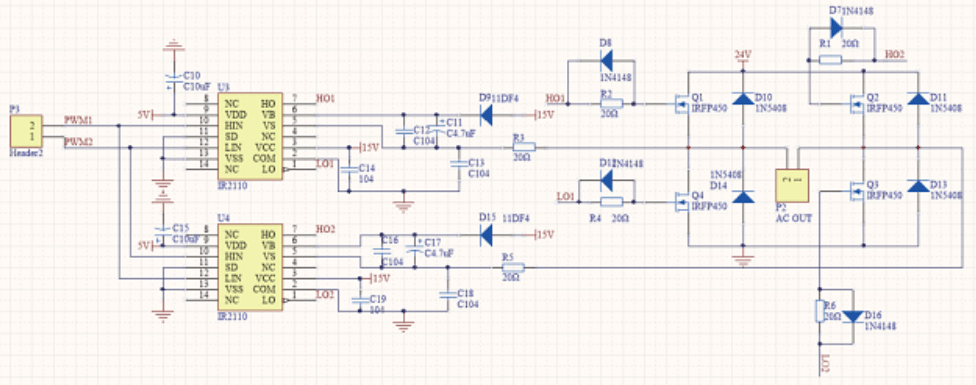
Omriktarkretsen använder två IR2110-driv IC. Varje IR2110 styr en halvbrosektion, så två drivchip används för att styra fyra MOSFET:ar i en fullbro-omriktare. MOSFET:arna är ordnade som övre och nedre switchar på varje sida av bron.
PIC16F716 mikrokontrollern tillhandahåller PWM-kontrollsignalerna för drivchipen. Dessa signaler kontrollerar växlingssekvensen för de fyra MOSFET:arna. I en fullbro-omriktare växlas diagoanala MOSFET-par vanligtvis tillsammans för att skapa växelström genom lasten. Till exempel, ett diagonalt par slås på för att få strömmen att flöda i en riktning, och det motsatta paret slås på för att få strömmen att flöda i motsatt riktning.
IR2110 Omriktarschema
IR2110-drivchipen förstärker PWM-signalerna och tillhandahåller den korrekta gate-drivspänningen för MOSFET:arna. Bootstrap-kondensatorerna och dioderna i kretsen hjälper till att försörja avsnitten för hög-sida drivrutinen. Gate-motstånd används också för att kontrollera MOSFET-växlingshastigheten och minska ringing, brus och växlingsstress.
Som visas i figuren ovan, tas utgången från brosektionen och levereras till lasten. Eftersom MOSFET:arna växlar snabbt, måste kontrollsignalerna tidsinställas noggrant. Död tid krävs mellan de övre och nedre switcharna på samma broben för att förhindra kortslutningar. Rätt tidsinställning, stabil gate-drivning och korrekt val av bootstrap-kondensator är viktiga för säker drift av omriktaren.
MCU-system
PIC16F716 mikrokontrollern fungerar som huvudkontrollenhet i omriktersystemet. Den är lämplig för kompakta omriktardesigner eftersom den har inbyggda perifera funktioner, låg strömförbrukning och tillräckligt med I/O-pinnar för grundläggande kontroll- och övervakningsuppgifter. I denna hårdvarusektion fokuseras det på stödkretsen som gör att mikrokontrollern kan fungera pålitligt.
PIC16F716-kretsen använder en reglerad 5 V strömförsörjning. Denna stabila matningsspänning är viktig eftersom mikrokontrollen måste fungera inom sitt krav på spänningsområde för att undvika återställningsproblem, instabila logiknivåer eller felaktig kontrollutgång. Rätt strömförsörjningsfilter bör också användas nära MCU-stiften för att minska brus från omriktarens kraftstege.
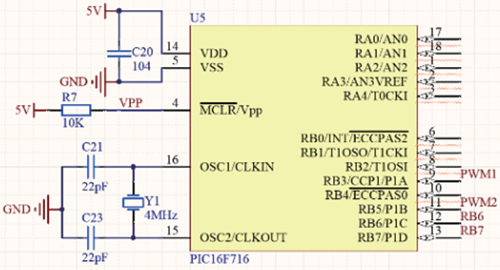
PIC16F716 Perifera Kretsdiagram
Oscillatorcirkeln tillhandahåller klocksignalen som behövs för programexekvering. I denna design är en 4 MHz klockkrystalanslutning kopplad till oscillatorstiften på PIC16F716. Kondensatorerna som är kopplade till kristallen hjälper till att stabilisera oscillationen och låter mikrokontrollen köra med en jämn klockfrekvens.
Återställningscirkeln är kopplad till MCLR/VPP-stiftet. En pull-up resistor håller detta stift på den normala driftläget under systemets drift. Detta gör att mikrokontrollen kan starta korrekt när strömmen påslås och hjälper till att förhindra oönskade återställningar orsakade av brus eller instabila matningsförhållanden.
I/O-stiften på PIC16F716 är kopplade till IR2110-drivkretsen och andra kontrollrelaterade delar av omriktaren. Dessa stift tillhandahåller kontrollgränssnittet mellan mikrokontrollen och drivsteget. Vissa stift kan också användas för återkopplings- eller skyddssignaler, beroende på den slutliga kretsdesignen.
PWM-kontroll och programvarudesign
Programvarudesignen ansvarar för att generera kontrollsignaler som används av omriktaren. I denna design använder PIC16F716 sitt förstärkta Capture/Compare/PWM (ECCP)-modul för att producera PWM-signaler för IR2110-drivkretsen. Rätt programvarukonfiguration är viktig eftersom den bestämmer omkopplingsfrekvensen, arbetscykeln, signalernas timing och den övergripande omriktarens prestanda.
PWM-vågskapandeprincip
Omriktaren använder den förstärkta Capture/Compare/PWM-modulen, eller ECCP-modulen, på PIC16F716-mikrokontrollen för att generera PWM-signaler. PWM-kontroll används eftersom den gör att omriktaren kan styra MOSFET:arnas omkopplingsläge genom att ändra pulstiming och arbetscykel.
I denna design är ECCP-modulen konfigurerad för att arbeta i halvbro-utgångsläge. Detta gör att mikrokontrollen kan generera två komplementära PWM-signaler. När en utgång är hög är den andra utgången låg. Detta signalförhållande är nödvändigt för att kontrollera de övre och nedre MOSFET:erna i samma omriktarbrottben.
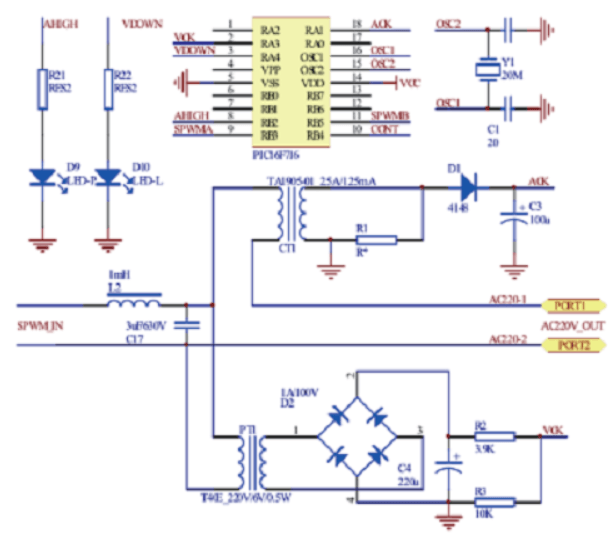
Omriktarskyddskrets
PWM-utgångarna skickas till IR2110-drivkretsen. Drivaren ökar sedan signalstyrkan så att MOSFET:erna kan växla korrekt. Mikrokontrollen måste också lägga till dödtid mellan komplementära PWM-signaler. Dödtid är en kort fördröjning som förhindrar att de övre och nedre MOSFET:erna slås på samtidigt. Utan denna fördröjning kan skottström uppstå och skada omriktaren.
Figuren ovan visar omriktarskyddskretsen kopplad runt kontroll- och strömförsörjningssektionerna. Skyddskretsen hjälper till att övervaka onormala utgångs- eller matningsförhållanden och skickar återkoppling till mikrokontrollen. Detta gör att systemet kan minska omkopplingsaktivitet eller stoppa omriktaren när ett fel registreras.
PWM-parametrarberäkning och konfiguration
För att generera PWM-vågformen måste programvaran definiera PWM-perioden och pulsens bredd. PWM-perioden bestämmer utgångsfrekvensen, medan pulsens bredd bestämmer arbetscykeln. I det givna designexemplet är målsättningen för utgångsfrekvensen 50 Hz och arbetscykeln är 30%.
PWM-perioden beräknas med hjälp av den grundläggande frekvensformeln:
T = 1 / f
För en 50 Hz-signal:
T = 1 / 50 = 0.02 sekunder = 20 ms
Om den erforderliga arbetscykeln är 30% är pulsbredden:
Pulsbredd = 20 ms × 30% = 6 ms
Dessa värden översätts sedan till registerinställningar för mikrokontrollen. Programvaran ställer in ECCP-kontrollregistret, Timer2-registret, PWM-periodregistren och pulsbreddsregistret. Timer2 tillhandahåller tidsbasen för PWM-drift, medan PR2- och CCPR-register definierar period och arbetscykel.
En förenklad konfigurationsprocess inkluderar att ställa in ECCP-modulen i PWM-läge, aktivera dödtidkontroll, konfigurera Timer2, ladda PWM-periodvärdet, ladda arbetscykelvärdet och starta timern. Dessa inställningar gör att PIC16F716 kontinuerligt kan generera PWM-signaler för IR2110-drivkretsen.
I praktisk programvara för omriktaren måste dessa värden matcha oscillatorfrekvensen, timerpreskalern och de erforderliga omkopplingslägen. Korrekt registerberäkning är viktig eftersom felaktiga timingvärden kan producera instabil utgång, överdriven värme eller felaktig MOSFET-omkoppling.
Programtestresultat
Efter att mjukvaran har laddats upp till PIC16F716 mikrokontrollern bör PWM-utgången testas med en oscilloskop. Figur 6 visar de uppmätta utgångsvågformerna från två mikrokontrollerutgångar. De två vågformerna är komplementära, vilket betyder att en signal slås på medan den andra slås av.
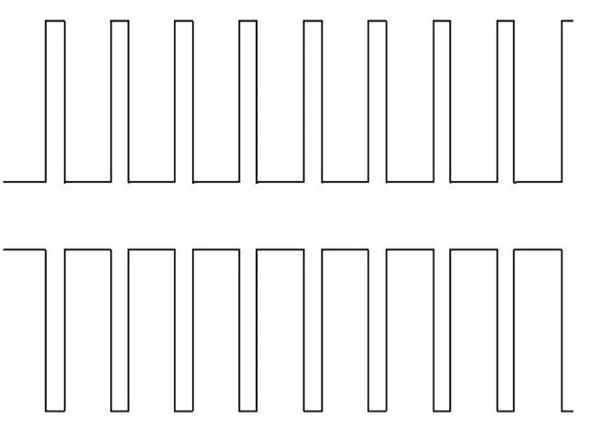
Utgångsvågform
Denna komplementära vågform bekräftar att mjukvaran genererar det korrekta växlingsförhållandet för inverterardrivsteget. Den synliga separationen mellan växlingsstatusar stöder också säkrare drift eftersom det minskar risken för att båda MOSFET:erna slås på samtidigt.
Vågen som visas i figur 6 är inte den slutliga filtrerade AC-utgången. Istället representerar den styrsignalen som används för att driva inverterbrytarna. Efter att dessa PWM-signaler har passerat genom IR2110-drivaren och MOSFET-bryggan kan inverterutgången filtreras och formas till den erforderliga AC-vågformen för belastningen.
Utgångsstegets drift och AC-vågformsproduktion
Utgångssteget är ansvarigt för att omvandla DC-ström till AC-ström. I denna inverterdesign är fyra MOSFET:er arrangerade i en fullbryggkonfiguration och drivs av IR2110-gate-drivkretsarna. PIC16F716 mikrokontrollern genererar komplementära PWM-signaler som kontrollerar växlingssekvensen av MOSFET:erna.
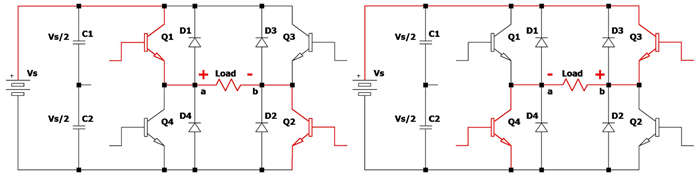
Full-Bridge Inverter Switching Operation
Invertern fungerar genom att växla mellan diagonala MOSFET-par alternativt. Under ett driftsläge leder Q1 och Q2, vilket tillåter strömmen att flöda genom lasten från punkt a till punkt b. Under nästa driftsläge leder Q3 och Q4, vilket omvänder strömflödet från punkt b till punkt a. Denna kontinuerliga omvändning av ström skapar en växelström över lasten.
De PWM-signaler som genereras av mikrokontrollern bestämmer hur länge varje växlingspar förblir på. Genom att justera PWM-dutycykeln kontrollerar invertern den effektiva utspänningen och den kraft som levereras till lasten. Eftersom MOSFET:erna huvudsakligen arbetar i fullt växlade tillstånd minimeras växlingsförlusterna och den övergripande omvandlingseffektiviteten förbättras.
Även om belastningsspänningen initialt består av högfrekventa växlingspulser, bildar det växelströmflöde som visas i figuren ovan grunden för AC-vågformsproduktionen. Efter att ha passerat genom utgångsfiltersteget blir vågformen jämnare och mer lämplig för praktiska AC-drivna laster.
Utgångsfiltering och vågforms kvalitet
Utgången från en PWM-inverter innehåller högfrekventa växlingskomponenter utöver den önskade lågfrekventa AC-vågformen. Medan dessa växlingssignaler är nödvändiga för inverterdrift kan de introducera harmonisk distorsion, elektromagnetisk interferens (EMI) och ytterligare uppvärmning i anslutna enheter.
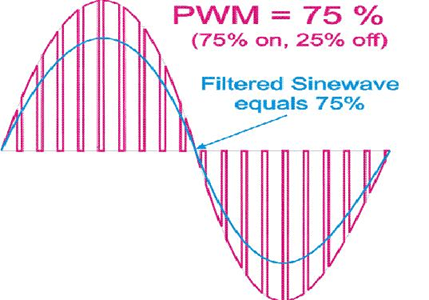
PWM-filtering och sinusvågsrekonstruktion
För att förbättra vågformens kvalitet passerar inverterutgången genom en filterkrets. Filtret består vanligtvis av induktorer och kondensatorer som dämpar högfrekventa växlingsharmoniska medan de tillåter den grundläggande AC-frekvensen att passera. Som ett resultat blir utgångsvågformen jämnare och närmare en sinusvågform.
Bättre filtering förbättrar prestandan hos motorer, transformatorer, nätaggregat och känslig elektronisk utrustning. Minskat harmoniskt innehåll sänker också elektriskt brus och förbättrar den övergripande systemeffektiviteten. Kvaliteten på filterdesignen påverkar direkt utgångsvågformens renhet och belastningskompatibilitet.
Utan korrekt filtrering kan inverterutgången likna en fyrkantvåg eller kraftigt förvrängd PWM-vågform. Även om vissa laster kan fungera under dessa förhållanden uppnår många enheter bättre prestanda och tillförlitlighet när de levereras med en renare vågform.
Inverter skydd och tillförlitlighetsdesign
Skydd är avgörande i en högfrekvent inverter eftersom ström-MOSFET:er växlar stora strömmar med hög hastighet. Utan korrekt skydd kan elektriska fel skada invertern inom millisekunder.
• Överströmskydd - Överströmskydd upptäcker överdriven ström som orsakas av överbelastningar eller kortslutningar. När strömmen blir för hög kan skyddskretsen minska PWM-dutycykeln eller stänga av invertern helt. Detta hjälper till att skydda MOSFET:erna, IR2110-drivkretsarna och nätaggregatskomponenterna från permanent skada.
• Dead-Time Control - Dead-time control lägger till en kort fördröjning mellan komplementära PWM-växlingssignaler. Denna fördröjning förhindrar att de övre och undre MOSFET:erna i samma bryggben slås på samtidigt. Utan dödtid kan skottström flyta direkt genom bron och snabbt förstöra växlingsanordningarna.
• Undervoltage-skydd - Undervoltage-skydd förhindrar att IR2110-drivaren och MOSFET:erna arbetar när matningsspänningen är för låg. Om portdrivspänningen är otillräcklig kanske MOSFET:erna inte slås på helt, vilket ökar växelförluster och värme. Att hålla drivrutinerna inom ett säkert spann förbättrar effektiviteten och pålitligheten.
• Termisk hantering - Termisk hantering hjälper till att kontrollera värmen som produceras av MOSFET:erna och andra kraftkomponenter. Kylflänsar, bra PCB-layout, korrekt avstånd och tillräcklig ventilation bidrar till att upprätthålla säkra driftstemperaturer. Lägre temperaturer minskar elektrisk stress och förbättrar livslängden hos omformaren.
• Kortslutningsskydd - Kortslutningsskyddet reagerar när utgången eller belastningen skapar en onormal strömväg. Systemet bör snabbt inaktivera PWM-signalen eller koppla bort utgången för att förhindra allvarliga skador. Detta skydd är särskilt viktigt i högfrekventa omformarcirklar eftersom fel kan uppstå mycket snabbt.
• Tillförlitlig programvarustyrning - Tillförlitlig programvarustyrning gör att mikrokontrollern kan övervaka driftsförhållanden och justera PWM-utgången när det behövs. PIC16F716 kan stödja säkrare drift genom att hantera dödtid, växelsiffror och felresponslogik. God programvarustyrning hjälper omformaren att förbli stabil under föränderliga belastningsförhållanden.
Praktiska tillämpningar av IR2110-baserade högfrekventa omformare
• UPS-system - Används för att omvandla batteri DC-ström till AC-ström under strömavbrott.
• Solarinverterare - Omvandlar DC-ström från solpaneler eller batterier till användbar AC-ström.
• Bärbara kraftkällor - Används i kompakta kraftstationer eftersom högfrekventa designer kan vara mindre och lättare.
• Motorstyrningar - Styr motors hastighet och utgångseffekt med hjälp av PWM-växling.
• Industriutrustning - Ger kontrollerad AC-ström för maskiner, automatiseringssystem och kraftomvandlare.
• Nödbakupskraft - Håller belysning, kommunikationsenheter och säkerhetssystem i drift under strömavbrott.
• Utbildningsprojekt - Används för att lära sig om omformardesign, MOSFET-drivning och PWM-kontroll.
Slutsats
Den IR2110-baserade högfrekventa omformaren kombinerar PWM-kontroll, MOSFET-växling och portdrivarteknik för att effektivt omvandla DC-ström till AC-ström. Genom att använda mikrokontrollern PIC16F716 och IR2110-drivaren kan systemet uppnå pålitlig växlingsprestanda, stabil utgångsdrift och förbättrad effektöverföringseffektivitet. Med korrekt filtrering och skyddsfunktioner ger denna omformardesign en praktisk lösning för kraftkällor, motorstyrningar, backupsystem och andra kraft-elektronikapplikationer.
Vanliga frågor [FAQ]
1. Hur väljer du den rätta bootstrap-kondensatorn för en IR2110-omformare?
Bootstrap-kondensatorn måste lagra tillräckligt med laddning för att driva högsidans MOSFET-port under växling. En kondensator som är för liten kan orsaka instabil drift, medan en överdrivet stor kondensator kan öka laddningstiden. Du kan typiskt välja värdet baserat på MOSFET-portens laddning och växlingsfrekvens.
2. Varför är portdrivspänningen viktig för MOSFET-prestanda i en omformare?
Portdrivspänningen avgör hur fullt MOSFET:en slås på. Om spänningen är för låg kan MOSFET:en fungera med högre motstånd, vilket orsakar överdriven värme, minskad effektivitet och ökade effektförluster.
3. Vad orsakar spänningsspikar i högfrekventa omformarcirklar?
Spänningsspikar orsakas vanligtvis av parasitisk induktans, snabba växlingstransitioner, dålig PCB-layout och långa kabelförbindelser. Snubberkretsar, korrekt jordning och optimerade layouter kan hjälpa till att minska dessa spikar.
4. Hur påverkar MOSFET-val effektiviteten hos omformaren?
MOSFET-egenskaper som på-resistans, portar, växlingshastighet och spänningsklassning påverkar direkt omformarens effektivitet. Att välja lämpliga MOSFET:er hjälper till att minska ledningsförluster och växlingsförluster.
5. Kan en IR2110-omformare fungera med olika utgångsfrekvenser?
Ja. Utgångsfrekvensen kan justeras genom mikrokontrollerprogramvaran genom att ändra PWM-kontrollparametrarna. Detta gör att omformaren kan stödja olika tillämpningskrav.
6. Varför används ofta en fullbro-omformare istället för en halvbrosomformare?
En fullbro-omformare kan leverera högre utgångsspänning och effekt till belastningen. Den ger också bättre utnyttjande av DC-matningsspänningen, vilket gör den lämplig för många kraftöverföringsapplikationer.
7. Hur påverkar växelfrekvensen för omformare transformatorns storlek?
Högre växelfrekvenser möjliggör användning av mindre transformatorer eftersom mindre magnetiskt material behövs för att överföra samma mängd effekt. Detta hjälper till att minska den totala storleken och vikten på omvandlaren.
8. Vad är de vanliga orsakerna till överhettning av MOSFET i omvandlarcirklar?
Överhettning av MOSFET kan bero på otillräcklig grinddrivspänning, otillräcklig kylning, för hög växelfrekvens, dålig PCB-design, hög belastningsström eller felaktiga inställningar för dödtid.
Relaterad artikel
-
![Hur fungerar JRC4558 operationsförstärkaren?]() Jun 10 2026
Jun 10 2026 -
![Steg-för-steg tillverkning av integrerade kretsar]() Jun 09 2026
Jun 09 2026


relaterade produkter

CGJ4J2X7R1A684K125AA
CAP CER 0.68UF 10V X7R 0805

T496D107M010AS
CAP TANT 100UF 20% 10V 2917

STM32F302RBT7
IC MCU 32BIT 128KB FLASH 64LQFP

CD74HC4051E
IC MUX 8:1 130OHM 16DIP

DAC8581IPW
IC DAC 16BIT V-OUT 16TSSOP
89H24NT6AG2ZCHLGI
IC INTFACE SPECIALIZED 484FCBGA

CY7C1370D-200BZC
IC SRAM 18MBIT PARALLEL 165FBGA

CM1117GCM223
CM1117GCM223 NO

F102052AFN-EL05
F102052AFN-EL05 TI

2SK3136
2SK3136 RENESAS
MC33388DR2G
MC33388DR2G FREESCAL

T491C226M004ZT
CAP TANT 22UF 20% 4V 2312
SPMC75F2313A-HD161
SPMC75F2313A-HD161 SUNPLUS