alla kategorier
-
Integrerade kretsar (ICs)
Integrerade kretsar (ICs)
- Gränssnitt - Sensor, Kapacitiv Touch(642)
- Specialiserade IC: er(12302)
- PMIC - Spänningsregulatorer - Speciellt syfte(5644)
- PMIC - spänningsregulatorer - linjära regulatorstyrare(793)
- PMIC - Spänningsregulatorer - Linjär + Växling(1829)
- PMIC - Spänningsregulatorer - Linjär(70981)
- PMIC - Spänningsregulatorer - DC DC -omkopplingsregulatorer(39569)
- PMIC - Spänningsregulatorer - DC DC -omkopplingskontroller(13507)
- PMIC - Spänningsreferens(9453)
- PMIC - V / F och F / V-omvandlare(145)
- PMIC - Termisk hantering(592)
- PMIC - Handledare(47946)
- PMIC - RMS till DC-omvandlare(170)
- PMIC - Strömförsörjning, monitorer(2104)
- PMIC - Power Over Ethernet (PoE) Controllers(1008)
- PMIC - Power Management - Specialiserad(7722)
- PMIC - Power Distribution Switches, Load Drivers(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - ELLER Controllers, Ideal Diodes(705)
- PMIC - Motor Drivers, Controllers(4712)
- PMIC - Belysning, Ballast Controllers(560)
- PMIC - LED-drivrutiner(7282)
- PMIC - laserskrivare(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - Gate Drivers(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Energimätning(654)
- PMIC - Display Drivers(1435)
- PMIC - Nuvarande Förordning / Förvaltning(1481)
- PMIC - Batteristyrning(5553)
- PMIC - Batteriladdare(3831)
- PMIC - AC DC-omvandlare, offline switchare(4905)
- Memory - Controllers(358)
- Minne - Konfiguration Proms för FPGA(639)
- Minne - Batterier(13)
- Minne(65694)
- Logik - Universella bussfunktioner(706)
- Logik - Translators, Level Shifters(2854)
- Logik - Speciallogik(1870)
- Logic - Signal Switches, Multiplexers, Decoders(9420)
- Logic - Shift Registers(2665)
- Logik - Paritetsgeneratorer och Checkers(335)
- Logik - Multivibratorer(831)
- Logik - Spärrar(3658)
- Logik - grindar och inverterare - Multifunktion, konfigurerbar(1687)
- Logik - Gates och växelriktare(16453)
- Logik - Flip Flops(7780)
- Logik - FIFO-minne(4240)
- Logik - räknare, uppdelare(3456)
- Logik - Komparatorer(592)
- Logik - buffertar, drivrutiner, mottagare, sändtagare(17835)
- Lineär - Videobehandling(2909)
- Linjär - Jämförare(5084)
- Lineära - Analoga Multiplikatorer, Dividers(263)
- Linjär - förstärkare - Videoförstärkare och moduler(1905)
- Linjär - Förstärkare - Särskilt ändamål(1856)
- Linjär - förstärkare - instrumentering, OP -förstärkare, buffertförstärkare(34236)
- Linjär - Förstärkare - Ljud(4567)
- Gränssnitt - Röstinspelning och uppspelning(556)
- Gränssnitt - Uarts (Universal Asynchronous Mottagare sändare)(1237)
- Gränssnitt - Telekom(4467)
- Gränssnitt - Specialiserat(4833)
- Gränssnitt - Signal Terminatorer(333)
- Gränssnitt - Signalbuffertar, repeater, delare(1449)
- Gränssnitt - Serializers, Deserializers(1480)
- Gränssnitt - Sensor- och detektorgränssnitt(1524)
- Gränssnitt - Moduler(169)
- Gränssnitt - Modem - IC och moduler(407)
- Gränssnitt - I / O-utbredare(1136)
- Gränssnitt - Filter - Aktiv(1226)
- Gränssnitt - Kodare, avkodare, omvandlare(714)
- Gränssnitt - drivrutiner, mottagare, sändtagare(20755)
- Gränssnitt - Direct Digital Synthesis (DDS)(117)
- Gränssnitt - Controllers(3628)
- Gränssnitt - CODECs(1676)
- Gränssnitt - analoga switchar, multiplexer, demultiplexers(12567)
- Gränssnitt - analoga switchar - speciellt syfte(2533)
- Embedded - System On Chip (SoC)(4496)
- Inbäddad - PLD (Programmerbar logisk enhet)(971)
- Inbäddad - Mikroprocessorer(10083)
- Inbäddad - Mikrokontroller - Applikationsspecifik(2275)
- Inbäddad - Mikrokontrollatorer(99285)
- Inbäddad - Mikrokontroller, mikroprocessor, FPGA -moduler(1527)
- Inbäddad - FPGAS (fältprogrammerbar grindarray) med mikrokontroller(81)
- Inbäddad - FPGA (Field Programmable Gate Array)(27747)
- Inbäddad - DSP (Digital Signal Processors)(4081)
- Embedded - CPLDS (komplexa programmerbara logikenheter)(5187)
- Datainsamling - Touch Screen Controllers(1210)
- Datainsamling - Digital till analoga omvandlare (DAC)(14419)
- Datainsamling - Digitala potentiometrar(6250)
- Dataförvärv - Analog till Digital Converters (ADC)(17776)
- Data Acquisition - Analog Front End (AFE)(787)
- Datainsamling - ADC / DAC - Särskilt syfte(3043)
- Klocka / Timing - Realtidsklockor(2446)
- Klocka/timing - programmerbara timers och oscillatorer(23469)
- Klocka / Timing - IC-batterier(4)
- Klocka / Timing - Delay Lines(1049)
- Klocka/timing - Klockgeneratorer, PLL: er, frekvenssyntesizers(32775)
- Klocka / Timing - Klockbuffertar, Drivrutiner(4568)
- Klocka / Timing - Application Specific(8652)
- Ljud speciellt syfte(1564)
Relevant tillverkare







-
Diskreta halvledarprodukter
Diskreta halvledarprodukter
- Aktuell reglering - dioder, transistorer(1090)
- Transistorer - Särskilt ändamål(226)
- Transistorer - Programmerbar Unijunction(48)
- Transistorer - JFETs(1558)
- Transistorer - IGBT - Single(4799)
- Transistorer - IGBT-moduler(63420)
- Transistorer - IGBT - Arrays(26)
- Transistorer - FET, MOSFET - Single(48330)
- Transistorer - FET, MOSFET - RF(4903)
- Transistorer - FET, MOSFET - Arrays(6641)
- Transistorer - Bipolar (BJT) - Singel, förspänd(4539)
- Transistorer - Bipolär (BJT) - Singel(25800)
- Transistorer - Bipolär (BJT) - RF(2087)
- Transistorer - Bipolar (BJT) - Matriser, förspänd(2115)
- Transistorer - Bipolär (BJT) - Arrays(2310)
- Tyristorer - TRIACs(4044)
- Thyristors - SCRs - Moduler(3967)
- Tyristorer - SCR(5436)
- Thyristorer - DIACs, SIDACs(319)
- Drivrutinsmoduler(1627)
- Dioder - Zener - Single(87483)
- Dioder - Zener - Arrays(2619)
- Dioder - Variabel kapacitans (varicaps, varaktorer)(1200)
- Dioder - RF(2753)
- Dioder - Rectifiers - Single(67528)
- Dioder - Likriktare - Arrays(20581)
- Dioder - Bridge Likriktare(11700)
Relevant tillverkare




-
RF / IF och RFID
RF / IF och RFID
- Abonnent Identification Module (SIM) -kort(77)
- RF -cirkulatorer och isolatorer(1742)
- RFID, RF Access, Monitoring ICs(1550)
- RFID Transponders, Tags(747)
- RFID-läsarmoduler(464)
- RFID -utvärdering och utvecklingssatser, styrelser(30)
- RFID antenner(329)
- RFI och EMI - Skärmning och absorberande material(6444)
- RFI och EMI - Kontakter, finger och packningar(7497)
- RF-sändare(668)
- RF Transceiver Moduler(6900)
- RF Transceiver ICs(4169)
- RF-omkopplare(9276)
- RF-sköldar(16401)
- RF-mottagare(1998)
- RF -mottagare, sändare och sändtagare färdiga enheter(2763)
- RF Power Dividers / Splitters(1223)
- RF Power Controller ICs(86)
- RF-modulatorer(710)
- RF mixers(2800)
- RF olika IC och moduler(3276)
- RF Front End (LNA + PA)(419)
- RF -utvärdering och utvecklingssatser, styrelser(747)
- RF riktningskopplare(2718)
- RF Diplexerare(1464)
- RF-detektorer(412)
- RF-demodulatorer(249)
- RF-antenner(12319)
- RF förstärkare(19651)
- balun(1496)
- dämpare(4852)
Relevant tillverkare







-
optoelektronik
optoelektronik
- Optomekanisk(480)
- Belysningsarmaturer(125)
- Laserdioder, lasermoduler - Laserleverans, laserfibrer(345)
- Hene lasersystem(31)
- Hene laserhuvuden(27)
- Visa bakgrundsbelysningar(93)
- Xenon Lighting(387)
- Pekskärm överlagringar(453)
- Panelindikatorer, Pilotljus(75729)
- Optik - Fjärrfosfor Ljuskälla(269)
- Optik - Reflektorer(665)
- Optik - Ljusrör(5384)
- Optik - Linser(4951)
- LED - Spacers, Standoffs(2718)
- LED-lampor - Lampbyte(29718)
- LED - Circuit Board -indikatorer, matriser, lätta staplar, stapeldiagram(9083)
- LED-termiska produkter(667)
- LED-ljuskit(64)
- LED-belysning - Vit(37580)
- LED-belysning - Färg(4728)
- LED-belysning - COB, motorer, moduler(28735)
- LED Indikering - Diskret(27601)
- Laserdioder, moduler(1553)
- Lampor - Incandescents, Neons(311004)
- Lampor - Cold Cathode fluorescerande (CCFL) & amp;Uv(164)
- Växelriktare(7728)
- Infraröd, UV, Synliga Emitterare(3871)
- Fiber Optics - Sändare - Drive Circuitry Integrated(4085)
- Fiberoptik - Sändare - Diskret(350)
- Fiberoptik - Transceiver Moduler(18758)
- Fiberoptik - Switches, Multiplexers, Demultiplexers(1387)
- Fiberoptik - Mottagare(695)
- Fiberoptik - Attenuatorer(654)
- elektroluminescent(102)
- Display, Monitor - Interface Controller(98)
- Displaymoduler - Vakuumfluorescerande (VFD)(249)
- Display Modules - LED Dot Matrix och Cluster(865)
- Displaymoduler - LED-tecken och numerisk(5421)
- Displaymoduler - LCD, OLED, Grafisk(4654)
- Displaymoduler - LCD, OLED-tecken och numerisk(2202)
- Displaybitar, linser(88)
- Adresserbar, specialitet(458)
Relevant tillverkare







-
Givare, Givare
Givare, Givare
- Ultraljudsmottagare, sändare - Industrial(115)
- Temperatursensorer - Termostater - Mekanisk - Industrial(3103)
- Temperatursensorer - analog och digital utgång - Industrial(209)
- Närhetssensorer - industri(13611)
- Trycksensorer, givare - Industrial(26503)
- Optiska sensorer - Fotonik - räknare, detektorer, SPCM (Single Photon Counting Module)(751)
- Optiska sensorer - kameramoduler(875)
- Magnetiska sensorer - Position, närhet, hastighet (moduler) - Industrial(554)
- Force Sensors - Industrial(346)
- Flödessensorer - industri(151)
- Flottör, nivå sensorer - industriell(310)
- Kodare - industri(4980)
- Färgsensorer - Industrial(50)
- Tryck på sensorer(100)
- Ultraljudsmottagare, sändare(2421)
- Temperaturgivare - Termostater - Solid State(1096)
- Temperaturgivare - Termostater - Mekanisk(3397)
- Temperaturgivare - Termoelement, temperaturprober(1921)
- Temperatursensorer - RTD (motståndstemperaturdetektor)(1525)
- Temperaturgivare - PTC-termistorer(2273)
- Temperaturgivare - NTC-termistorer(13259)
- Temperatursensorer - Analog och digital utgång(3928)
- Strain Gauges(1399)
- Specialiserade sensorer(1861)
- Solceller(503)
- Shock Sensors(84)
- Sensor Interface - Junction Blocks(2519)
- Sensorkabel - Montering(22011)
- Proximity / Occupancy Sensors - Färdiga enheter(725)
- Närhetssensorer(2860)
- Tryckgivare, Givare(11317)
- Positionsensorer - Vinkel, linjär positionsmätning(6022)
- Optiska sensorer - Reflekterande - Logisk utgång(194)
- Optiska sensorer - reflekterande - analog utgång(432)
- Optiska sensorer - Fototransistorer(1027)
- Optiska sensorer - fotoporters - slottyp - transistorutgång(1427)
- Optiska sensorer - fotoporters - slottyp - logikutgång(1215)
- Optiska sensorer - Fotoelektriska, industriella(16763)
- Optiska sensorer - Fotodioder(1543)
- Optiska sensorer - Fotor detektorer - fjärrmottagare(2605)
- Optiska sensorer - Fotor detektorer - logikutgång(146)
- Optiska sensorer - Bilddetektorer - CdS-celler(74)
- Optiska sensorer - Avståndsmätning(377)
- Optiska sensorer - omgivande ljus, IR, UV -sensorer(1305)
- Multifunktions(558)
- Rörelsesensorer - Vibration(337)
- Rörelsesensorer - Tiltväxlar(67)
- Rörelsesensorer - Optisk(719)
- Rörelsesensorer - Inclinometrar(175)
- Rörelsessensorer - IMU (tröghetsmätningsenheter)(416)
- Motion Sensors - Gyroskop(214)
- Rörelsesensorer - Accelerometrar(1911)
- Magneter - Sensor Matchad(119)
- Magneter - Multi Purpose(1965)
- Magnetiska sensorer - Omkopplare (Solid State)(3700)
- Magnetiska sensorer - position, närhet, hastighet (moduler)(5199)
- Magnetiska sensorer - Linjär, Kompass (IC)(1247)
- Magnetiska sensorer - kompass, magnetfält (moduler)(35)
- LVDT -givare (linjär variabel differentiell transformator)(204)
- IrDA Transceiver Modules(196)
- Bildsensorer, kamera(2235)
- Fuktighet, fuktgivare(1425)
- Gas sensorer(1217)
- Force Sensors(188)
- Flödesgivare(550)
- Float, Level Sensors(1343)
- kodare(6357)
- Dammsensorer(43)
- Aktuella givare(3455)
- Färggivare(85)
- Förstärkare(1905)
Relevant tillverkare







-
Kontakter, förbindelser
Kontakter, förbindelser
- USB, DVI, HDMI -kontakter(446)
- Solid State Lighting -kontakter(555)
- Uttag för ICS, transistorer(953)
- Pluggbara kontakter(1221)
- Fotovoltaic (solpanel) kontakter(136)
- Fiberoptiska kontakter(370)
- FFC, FPC (platt flexibla) kontakter(761)
- D-sub, D-formade kontakter(2887)
- Koaxiella kontakter (RF)(2389)
- Cirkulära kontakter(14162)
- Kraftanslutningar av bladtyp(273)
- Pluggar och behållare(2597)
- USB, DVI, HDMI-kontakter - Adaptrar(572)
- USB, DVI, HDMI -kontakter(4298)
- Terminaler - Wire to Board-kontakter(217)
- Terminaler - Wire Splice Connectors(4322)
- Terminaler - Wire Pin Connectors(328)
- Terminaler - Turretkontakter(1273)
- Terminaler - Specialiserade kontakter(2042)
- Terminaler - Spadkontakter(3902)
- Terminaler - Löddarmkontakter(345)
- Terminaler - Skruvkontakter(745)
- Terminaler - Ringkontakter(12596)
- Terminaler - Rektangulära kontakter(4747)
- Terminaler - Snabbkopplingar, snabbkopplingar(8514)
- Terminaler - PC-pin, enkla postkontakter(3776)
- Terminaler - PC Pin-mottagare, uttagskontakter(5883)
- Terminaler - Magnetiska trådkontakter(1653)
- Terminaler - Knivkontakter(112)
- Terminaler - Höljen, Stövlar(2850)
- Terminaler - Foliekontakter(108)
- Terminaler - Barrel, Bullet Connectors(1107)
- Terminaler - Adaptrar(137)
- Terminal Strips och Turret Boards(1159)
- Terminalkopplingssystem(2533)
- Terminalblock - Wire to Board(43615)
- Terminalblock - Specialiserad(3722)
- Terminalblock - Strömfördelning(847)
- Plintblock - Panelmontering(1359)
- Terminalblock - Gränssnittsmoduler(1819)
- Terminalblock - Huvud, Pluggar och Sockets(119920)
- Terminalblock - Din Rail, Channel(9373)
- Terminalblock - Kontakter(65)
- Terminalblock - Barriärblock(47517)
- Terminalblock - Adaptrar(1059)
- Solid State Lighting Connectors - Kontakter(271)
- Solid State Lighting -kontakter(1344)
- Socklar för IC, Transistorer - Adaptrar(275)
- Uttag för ICS, transistorer(22148)
- Shunts, Jumpers(907)
- Rektangulära kontakter - Fjäderbelastad(7721)
- Rektangulära kontakter - höljen(43023)
- Rektangulära kontakter - Headers, Special Pin(6129)
- Rektangulära kontakter - rubriker, behållare, kvinnliga uttag(229601)
- Rektangulära kontakter - Headers, Male Pins(543338)
- Rektangulära kontakter - Gratis hängning, panelmontering(30142)
- Rektangulära kontakter - kontakter(10681)
- Rektangulära kontakter - ombord i, direkt ledning till ombord(2432)
- Rektangulära kontakter - Adaptrar(475)
- Rektangulär - Board to Board -kontakter - rubriker, behållare, kvinnliga uttag(9)
- Rektangulär - Board to Board -kontakter - rubriker, manliga stift(2)
- Rektangulära kontakter - Brädavstånd, Stackers (Board to Board)(238901)
- Rektangulära kontakter - matriser, kanttyp, mezzanin (styrelse till ombord)(37853)
- Strömuttagskontakter - Inlopp, utlopp, moduler(10310)
- Pluggbara kontakter(6049)
- Fotovoltaiska (Solar Panel) kontakter - kontakter(77)
- Fotovoltaic (solpanel) kontakter(504)
- Modulära kontakter - Wiring Blocks(99)
- Modulära kontakter - kontakter(1674)
- Modulära kontakter - Plug-höljen(181)
- Modulära kontakter - Jacks With Magnetics(10152)
- Modulära kontakter - Jackar(23416)
- Modulära kontakter - Adaptrar(855)
- Minneskontakter - PC-kort - Adaptrar(21)
- Minneskontakter - PC-kortuttag(3299)
- Minneskontakter - Inline Module Sockets(3390)
- LGH-kontakter(764)
- Keystone - Inserts(2758)
- Keystone - Frontplattor, ramar(1926)
- Heavy Duty Connectors - Inlägg, moduler(4190)
- Tunga kontaktdon - höljen, huvarna, baserna(17226)
- Tunga kontaktdon - ramar(523)
- Heavy Duty Connectors - Kontakter(1832)
- Tunga anslutningar - Assemblies(671)
- Fiberoptiska kontakter - höljen(919)
- Fiberoptiska kontakter - Adaptrar(4455)
- Fiberoptiska kontakter(3001)
- FFC, FPC (Flat Flexible) kontakter - höljen(652)
- FFC, FPC (Flat Flexible) kontakter - kontakter(202)
- FFC, FPC (platt flexibla) kontakter(18691)
- D-Sub, D-formade kontakter - Terminatorer(47)
- D-Sub, D-formade kontakter - Höljen(12238)
- D-Sub, D-Shaped Connectors - Kontakter(2714)
- D-Sub, D-Shaped Connectors - Backshells, Hoods(5995)
- D-Sub, D-formade kontakter - Adaptrar(1304)
- D-Sub-kontakter(141346)
- D-formade kontakter - Centronics(8770)
- Kontakter, fjäderbelastad och tryck(630)
- Kontakter - Multi Purpose(6196)
- Kontakter - Ledarram(122)
- Koaxialkontakter (RF) - Terminatorer(1231)
- Koaxialkontakter (RF) - Kontakter(480)
- Koaxialkontakter (RF) - Adaptrar(6386)
- Koaxiella kontakter (RF)(25734)
- Cirkulära kontakter - höljen(441226)
- Cirkulära kontakter - kontakter(4737)
- Cirkelkontakter - Backshells och kabelklemmer(53692)
- Cirkulära kontakter - Adaptrar(8839)
- Cirkulära kontakter(1196254)
- Card Edge Connectors - Höljen(469)
- Card Edge-kontakter - Edgeboard-kontakter(672683)
- Card Edge Connectors - Kontakter(325)
- Card Edge Connectors - Adaptrar(73)
- Baktyp Strömkontakter - Höljen(837)
- Blade Typ Strömkontakter - Kontakter(393)
- Kraftanslutningar av bladtyp(4163)
- Mellan serieadaptrar(649)
- Fat - strömkontakter(935)
- Fat - ljudkontakter(2432)
- Fat - ljudadaptrar(92)
- Banan och stickkontakter - Jackar, pluggar(1644)
- Banan och tipskontakter - Bindande inlägg(239)
- Banan och tipskontakter - Adaptrar(75)
- Bakplansanslutningar - Specialiserad(45586)
- Bakplansanslutningar - höljen(6863)
- Bakplansanslutningar - Hårdmetrisk, Standard(6297)
- Bakplansanslutningar - DIN 41612(9408)
- Backplane Connectors - Kontakter(3583)
- Bakplansanslutningar - ARINC Inserts(2357)
- Bakplansanslutningar - ARINC(3789)
Relevant tillverkare







-
Motstånd
-
kondensatorer
kondensatorer
- Aluminiumelektrolytkondensatorer(16817)
- Trimmare, Variabel Kondensatorer(3151)
- Tunna filmkondensatorer(3473)
- Tantalkondensatorer(136103)
- Tantal - Polymerkondensatorer(9778)
- Silikonkondensatorer(320)
- Niobiumoxidkondensatorer(330)
- Glimmer och PTFE kondensatorer(9101)
- Filmkondensatorer(150406)
- Elektriska dubbelskiktskondensatorer (EDLC), superkondensatorer(2782)
- Keramiska kondensatorer(833829)
- Kondensatornätverk, Arrays(2383)
- Aluminiumelektrolytkondensatorer(125325)
- Aluminium - Polymerkondensatorer(7544)
Relevant tillverkare






-
transformers
-
isolatorer
-
Kristaller, Oscillatorer, Resonatorer
Kristaller, Oscillatorer, Resonatorer
Relevant tillverkare






-
Växlar
Växlar
- Sammankopplingar(2893)
- Emergency Stop (e-stop) switchar(1160)
- Kabelbrytare(571)
- Växla omkopplare(33608)
- Fyrhjulsomkopplare(742)
- Taktila omkopplare(14263)
- Snap Action, Limit Switches(28077)
- Slide Switches(5166)
- Väljarknappar(9720)
- Rotary Switches(13850)
- Vridbrytare(53790)
- Tryckknappar - Hall Effect(127)
- Tryckknappar(190826)
- Programmerbara bildskärmar(39)
- Navigationsbrytare, joystick(1882)
- Magnetiska, Reed Switches(1399)
- Knappsatsbrytare(637)
- Tangentlåsbrytare(3684)
- DIP-omkopplare(7747)
- Konfigurerbara switchkomponenter - objektiv(1435)
- Konfigurerbara strömställare - Belysningskälla(1236)
- Konfigurerbara switchkomponenter - kontaktblock(1401)
- Konfigurerbara Switch Komponenter - Body(16077)
- Koppla ur strömbrytarkomponenterna(2567)
Relevant tillverkare






-
reläer
reläer
- Säkerhetsreläer(1310)
- Reed reläer(1735)
- Högfrekventa (RF) reläer(1190)
- Contactors (Solid State)(686)
- Kontaktorer (elektromekaniska)(11952)
- Bilreläer(1881)
- Solid State Relays(10652)
- Signalreläer, upp till 2 ampere(9149)
- Relä Sockets(2075)
- Strömreläer, över 2 ampere(31604)
- I / O-relämoduler(712)
- I / O-relämoduler - Input(2)
- I / O-relämodulställningar(247)
Relevant tillverkare























Välj språk
Aktuellt språk
Svenska
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
L298 Motor Driver IC Arbetsprincip, Kretsar, & Datablad
Tid: 2026/06/25
Bläddra: 213
L298 är en dubbel full-bron motor driver IC designad för att styra DC-motorer, bipolära stegmotorer och andra induktiva laster. L298 finns i flera paketversioner, där L298N är den mest använda. "N" beteckningen hänvisar till Multiwatt-15 paketet, som är designat för högre effektbehandling och enkel montering av kylfläns. Denna artikel förklarar hur L298 fungerar, dess pinfunktioner, elektriska specifikationer, stödja motorer, typiska kretsar, jämförelse med moderna motorförare och vanliga tillämpningar.

Katalog
Hur L298 Motor Driver Fungerar
L298 styr DC-motorer och stegmotorer med hjälp av två oberoende H-bron kretsar, märkta Kanal A och Kanal B i blockdiagrammet. Varje H-brygga tar emot logiska signaler från ingångsstiften och växlar den interna transistornätverket för att kontrollera riktningen av strömmen som flyter genom motorn.
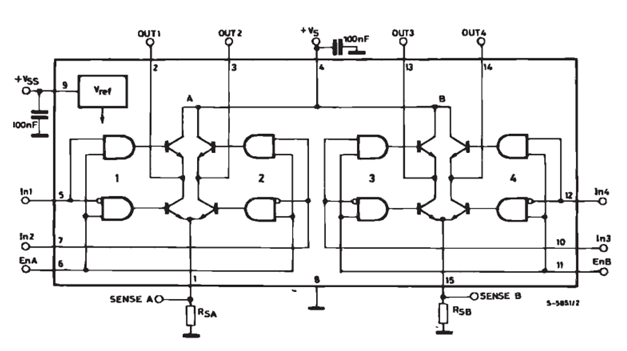
Som visas i blockdiagrammet, IN1 och IN2 kontrollerar Kanal A, medan IN3 och IN4 kontrollerar Kanal B. När en ingång är HÖG och den andra är LÅG, skapar H-bron en strömväg genom motorn, vilket får den att rotera. Omvänt av ingångstillstånden omvänder strömflödet och ändrar motorrotationens riktning.
ENA och ENB stiften aktiverar eller inaktiverar varje H-brygga. Dessa stift drivs vanligtvis av en PWM-signal från en mikrokontroller. Genom att justera PWM-symmetrin ändras den genomsnittliga spänningen som appliceras på motorn, vilket möjliggör hastighetskontroll.
Motorkraften tillförs genom +Vs-stiftet, medan den interna logiken fungerar från +Vss. SENSE A och SENSE B stiften kan anslutas till externa motstånd för att övervaka motorströmmen för skydds- eller kontrollsyften.
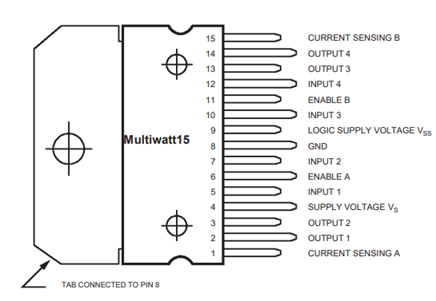
L298 Pinutgång och Pinfunktioner
| Stift Nr. |
Stift Namn |
Funktion |
| 1 |
Sense A |
Strömavkänningsanslutning för Kanal A. Vanligtvis ansluten till ett lågvärdesmotstånd för strömövervakning. |
| 2 |
OUT1 |
Utgångsterminal 1 av H-brygga A som är ansluten till motorn. |
| 3 |
OUT2 |
Utgångsterminal 2 av H-brygga A som är ansluten till motorn. |
| 4 |
Vs |
Motorkraftleveransspänning inmatning. Förser ström till utgångssteg. |
| 5 |
IN1 |
Logisk kontroll ingång 1 för H-brygga A. Arbetar med IN2 för att styra motorriktning. |
| 6 |
ENA |
Aktiveringsingång för H-brygga A. Används för att aktivera/inaktivera kanalen och för PWM hastighetskontroll. |
| 7 |
IN2 |
Logisk kontroll ingång 2 för H-brygga A. Arbetar med IN1 för att styra motorriktning. |
| 8 |
GND |
Jordanslutning för både logik- och kraftkretsar. Den metalliska fliken är också ansluten till detta stift. |
| 9 |
Vss |
Logikförsörjningsspänning inmatning, vanligtvis 5 V. Förser den interna kontrollkretst. |
| 10 |
IN3 |
Logikkontroll ingång 1 för H-Bridge B. Samarbetar med IN4 för att styra motorriktning. |
| 11 |
ENB |
Aktivera ingång för H-Bridge B. Används för att aktivera/inaktivera kanalen och för PWM hastighetskontroll. |
| 12 |
IN4 |
Logikkontroll ingång 2 för H-Bridge B. Samarbetar med IN3 för att styra motorriktning. |
| 13 |
OUT3 |
Utgångsterminal 1 av H-Bridge B ansluten till motorn. |
| 14 |
OUT4 |
Utgångsterminal 2 av H-Bridge B ansluten till motorn. |
| 15 |
Sense B |
Strömsensor anslutning för Kanal B. Vanligtvis ansluten till en låg värde resistor för strömövervakning. |
Viktiga elektriska specifikationer för L298
| Specifikation |
Värde |
Enhet |
| Motornätverks spänning (Vs) |
Upp till 46 (50 V absolut max) |
V |
| Logikförsörjnings spänning (Vss) |
4.5 till 7 (5 V typisk) |
V |
| Logik ingångs spänning (HÖG) |
≥ 2.3 |
V |
| Logik ingångs spänning (LÅG) |
≤ 1.5 |
V |
| Kontinuerlig utgångsström (Per kanal) |
2 |
A |
| Repetitiv topp- utgångsström |
2.5 |
A |
| Icke-repetitiv topputgångsström |
3 |
A |
| Total effekt dissipering |
25 |
W |
| Stillestånds ström (Vs) |
13–70 |
mA |
| Stillestånds ström (Vss) |
6–36 |
mA |
| Strömsensor spänningsområde |
-1 till 2.3 |
V |
| Utgångsspänning fall (1 A last) |
1.8–3.2 |
V |
| Utgångsspänning fall (2 A last) |
4.9 max |
V |
| Källans mättnads spänning (1 A) |
1.35 typisk |
V |
| Källans mättnads spänning (2 A) |
2.0 typisk |
V |
| Sänka mättnads spänning (1 A) |
1.2 typisk |
V |
| Sänka mättnads spänning (2 A) |
1.7 typisk |
V |
| Maximala omkastningsfrekvens |
25–40 |
kHz |
| Källans på- fördröjning |
2 |
µs |
| Källans av- fördröjning |
1.5 |
µs |
| Källans stighastighet |
0.7 |
µs |
| Källans falltid |
0.2 |
µs |
| Sänkas på- fördröjning |
1.6 |
µs |
| Sänkas av- fördröjning |
0.7 |
µs |
| Sänkas stighastighet |
0.2 |
µs |
| Sänkas falltid |
0.25 |
µs |
| Driftstemperatur intervall |
-25 till +130 |
°C |
| Lagringstemperatur intervall |
-40 till +150 |
°C |
Vilka motorer kan L298 driva?
L298 är utformad för att driva en mängd olika system baserade på borstade motorer genom dess dubbla H-broarkitektur. Varje H-bro kan oberoende styra riktning och hastighet för en ansluten last, vilket gör att IC:n kan driva två DC-motorer samtidigt eller en enda bipolär stegmotor.
Borstade DC-motorer
Borstade DC-motorer är de vanligaste motorerna som drivs av L298. IC:n kan styra både rotationsriktning och hastighet på en DC-motor genom att växla strömflödet genom sina H-bro-utgångar. En enda L298 kan driva en större DC-motor med hjälp av en kanal eller två separata DC-motorer genom att utnyttja båda H-brokanelerna.
Bipolära stegmotorer
L298 kan driva 2-fas bipolära stegmotorer genom att använda sina två H-brokaneler för att styra motorens två lindningar. Genom att aktivera lindningarna i en specifik sekvens roterar motorn i exakta vinkliga steg istället för kontinuerlig rotation. Detta möjliggör noggrann kontroll av position, hastighet och rörelseriktning.
Linjära aktuatorer och små robotaktuatorer
Många DC-linjära aktuatorer använder en intern borstade DC-motor, vilket gör dem kompatibla med L298. Genom att styra motorriktning genom H-bron kan aktuatorn förlängas eller dras tillbaka efter behov. Detta gör L298 användbar för tillämpningar som automatiserade dörrar, justerbara plattformar, ventiler och enkla industriella kontrollsystem.
Typiska L298-tillämpningskretsar
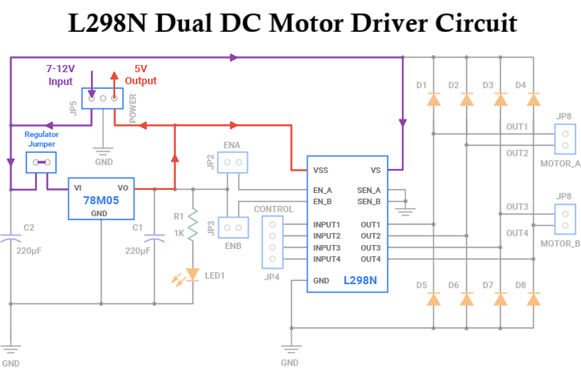
L298N dubbla DC-motordrivkrets
Kretsen använder L298N IC för att styra två DC-motorer. En 7–12V strömförsörjning driver motorerna genom VS-pinnen, medan 78M05-regulatorn konverterar denna ingång till 5V för L298N-logiksektionen genom VSS-pinnen.
L298N innehåller två interna H-bro kretsar. Dessa tillåter ström att flöda genom varje motor i vilken riktning som helst, så motorerna kan rotera framåt eller bakåt. OUT1 och OUT2 kontrollerar Motor A, medan OUT3 och OUT4 kontrollerar Motor B.
Ingångspinnarna INPUT1 till INPUT4 tar emot signaler från en mikrokontroller. Dessa signaler bestämmer motorriktningen. ENA och ENB-pinnarna aktiverar varje motor kanal och kan även ta emot PWM-signaler för att kontrollera motorns hastighet.
Kondensatorerna hjälper till att stabilisera strömförsörjningen, medan dioderna skyddar IC från bak-EMF spänningsspikar som produceras av motorerna. Sammantaget låter denna krets en låg energi kontroller säkert driva och kontrollera två likströmsmotorer.
Bipolär Steg-motor Drivkrets med L297 och L298
Denna krets kombinerar L297 stegmotor kontrollern och L298N dual H-bro motor drivrutin för att kontrollera en två-fasig bipolär stegmotor. L297 genererar den korrekta fassekvens som krävs för stegmotorens drift, medan L298N tillhandahåller den högre ström som behövs för att driva motorvindningarna.
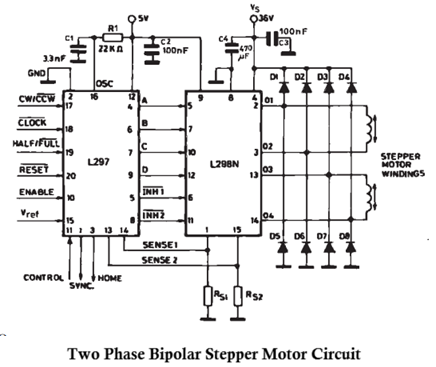
L297 tar emot kontrollsignaler som CLOCK, CW/CCW, HALF/FULL, RESET och ENABLE. Baserat på dessa ingångar genererar den fyra utgångssignaler (A, B, C och D) som bestämmer stegningssekvensen. CLOCK-ingången styr stegrate, medan CW/CCW-ingången väljer rotationsriktningen. HALF/FULL-ingången tillåter motorn att arbeta i antingen halvsteg eller fullstegsläge.
Utgångssignalerna från L297 är anslutna till ingångspinnarna på L298N. L298N fungerar som en dubbel H-bro drivrutin och växlar ström genom de två motorvindningarna. Genom att energisera vindningarna i rätt sekvens roterar motorn ett steg i taget med precis positionkontroll.
Resistorena RS1 och RS2 som är kopplade till SENSE-pinnarna är ström-sensor resistorer. De tillåter L297 att övervaka motorströmmen och implementera strömreglering genom sin interna chopper kontroll funktion. Detta hjälper till att förhindra överdriven ström och förbättrar motoreffektiviteten.
Dioderna D1–D8 är flybackdioder som skyddar L298N från spänningsspikar genererade av de induktiva motorvindningarna. Kondensatorerna nära strömförsörjningen hjälper till att filtrera brus och stabilisera driftsäkerheten.
L298 vs Moderna Motor Drivrutin ICs
| Data |
L298 |
L293D |
TB6612FNG |
DRV8833 |
BTS7960 |
| Drivertyp |
Bipolar transistor |
Bipolar transistor |
MOSFET |
MOSFET |
MOSFET |
| Motor Kanaler |
2 likströmsmotorer |
2 likströmsmotorer |
2 likströmsmotorer |
2 likströmsmotorer |
1 likströmsmotor |
| Kontinuerlig Ström |
2A/kanal |
600mA/kanal |
1.2A/kanal |
1.5A/kanal |
43A |
| Spänningstopp |
3A |
1.2A |
3.2A |
2A |
43A+ |
| Motor Spänning |
Upp till 46V |
Upp till 36V |
Upp till 13.5V |
2.7V–10.8V |
Upp till 27V |
| Logik Spänning |
5V |
5V |
2.7V–5.5V |
2.7V–7V |
3.3V–5V |
| Skyddsdioder |
Extern krävs |
Inbyggd |
Inbyggd |
Inbyggd |
Inbyggd |
| Huvud Användning |
Medel likströmsmotorer |
Små likströmsmotorer |
Små robotar |
Lågspänningsrobotar |
Högströms likströmsmotorer |
Vanliga Tillämpningar av L298
Bürstad likströmsmotor kontroll
L298 används ofta för att driva en eller två borstade likströmsmotorer. Den kan ändra motorriktning genom att vända strömflödet och kontrollera motorhastighet med hjälp av PWM-signaler från en mikrokontroller.
Bipolär Steg-motor Kontroll
L298 kan driva en två-fasig bipolär stegmotor genom att tillhandahålla ström till dess vindningar i rätt sekvens. För enklare styrning av stegen används den ofta med en L297 kontroll.
Utbildningsrobotik
L298 används ofta i robotkit och studentprojekt eftersom den är enkel att koppla ihop med Arduino och andra mikrokontroller. Den hjälper eleverna att förstå motor riktning kontroll, hastighetskontroll och H-bros drift.
Små Automationssystem
L298 kan styra motorer i enkla automatiserade system som små transportband, glidande mekanismer och motoriserade plattformar. Det är användbart när ett projekt behöver framåt- och bakåtrörelse.
Positioneringsmekanismer
L298 kan användas i kamerapanorerings- och tiltsystem, små CNC-axlar och andra positioneringsanordningar. I dessa tillämpningar driver den DC-motorer eller stegmotorer för att flytta en belastning till en önskad position.
Prototypmotorstyrenheter
Ingenjörer och hobbynördar använder L298 i prototypkretsar eftersom den är lätt att testa, allmänt tillgänglig och stöder separata logik- och motorförsörjningar. Detta gör den användbar för tidiga motorstyrningsdesignexperiment.
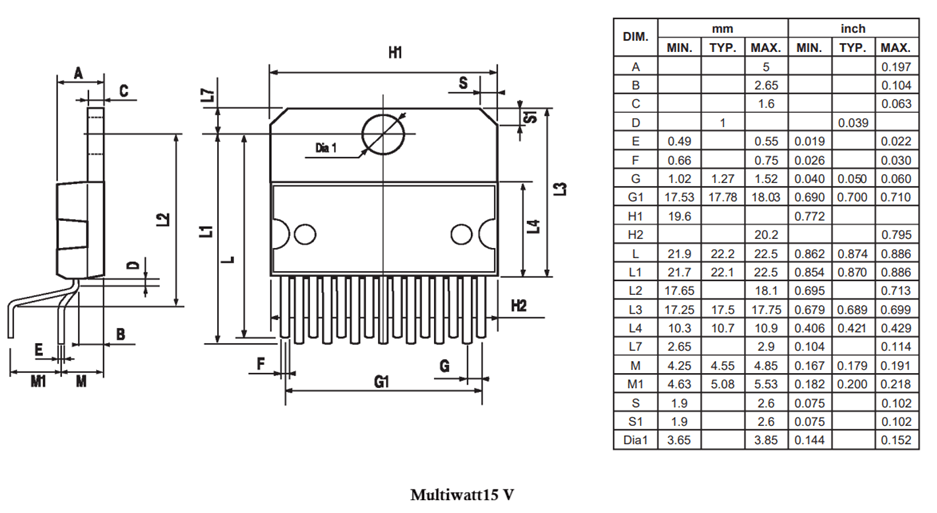
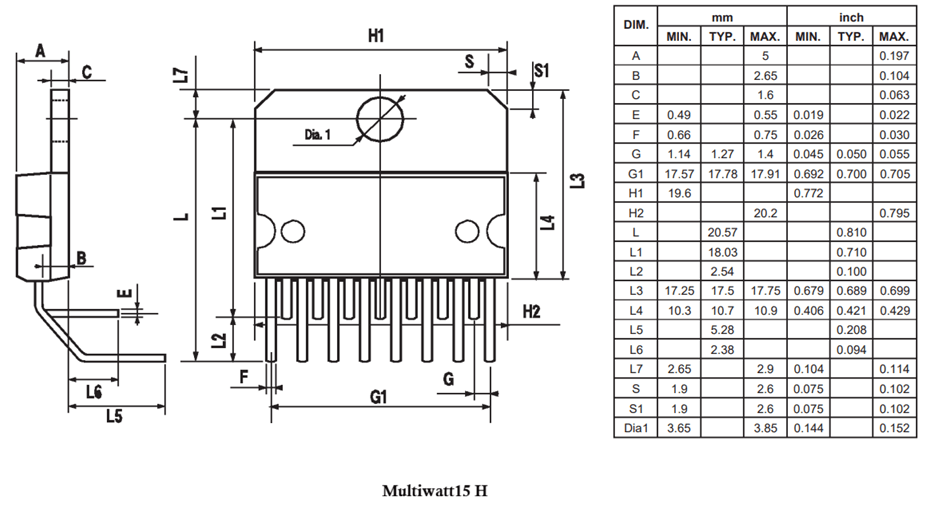
Mekaniska Dimensioner
Slutsats
L298:s dubbla fullbrygga drivrutins-ICs dubbla H-bryggdesign gör den tillräckligt flexibel för att styra två borstad DC-motorer eller en bipolar stegmotor, medan dess aktiveringsstift möjliggör enkel hastighetskontroll via PWM. Även om nyare MOSFET-baserade drivrutiner är mer effektiva, mindre och kallare, är L298 fortfarande användbar eftersom den är lätt att förstå, allmänt tillgänglig och lämplig för utbildningsrobotik, prototyper, små automatiseringssystem och allmänna motorstyrningskretsar.
Vanliga Frågor [FAQ]
1. Varför kräver L298 en separat logikförsörjning (Vss) och motorförsörjning (Vs)?
L298 separerar logik- och motorströmförsörjningarna för att förbättra tillförlitligheten. Logikförsörjningen driver den interna styrkretsen, medan motorströmförsörjningen driver H-bryggens utgångar. Detta förhindrar spänningsfluktuationer och elektriskt brus från motorerna att störa styrsignalerna.
2. Varför genererar L298 mer värme än moderna motorstyrnings-ICs?
L298 använder bipolär transistor-teknologi som har ett högre spänningsfall över utgångsstadiet. Detta orsakar att mer kraft omvandlas till värme. Moderna MOSFET-baserade drivrutiner har lägre förluster och fungerar därför mer effektivt.
3. Hur fungerar PWM-hastighetskontroll med L298?
PWM växlar snabbt ENA- eller ENB-stiftet på och av. Genom att ändra arbetscykeln för PWM-signalen förändras den genomsnittliga spänningen som levereras till motorn, vilket möjliggör smidig hastighetskontroll utan att ändra matningsspänningen.
4. Varför ingår strömavkänningstift i L298?
Sense A- och Sense B-stiften tillåter externa motstånd att mäta motorström. Denna funktion kan användas för överströmsskydd, strömbegränsning, motövervakning och slutna slingan motorkontrollsystem.
5. Vilka faktorer avgör om en motor är lämplig för L298?
De viktigaste faktorerna är motorns spänning, konstant ström, startström och stallström. Motorens strömkrav måste ligga inom L298:s driftgränser för att undvika överhettning eller skador.
6. Kan L298 användas i batteridrivna enheter?
Ja, men det är inte alltid det mest effektiva valet. På grund av dess högre effektförluster konsumerar L298 mer energi än MOSFET-baserade drivrutiner, vilket kan minska batteriets livslängd i bärbara tillämpningar.
7. Varför är återkopplingsdioder viktiga i L298-motorkretsar?
Motorer är induktiva laster som genererar spänningsspikar när strömmen ändras plötsligt. Återkopplingsdioder dirigerar säkert denna energi och skyddar L298 från potentiellt skadliga bak-EMF-spänningar.
Relaterad artikel
-
![Vad är en digital strömförsörjning och hur fungerar den?]() Jun 26 2026
Jun 26 2026 -
![Apple M1 Ultra-arkitektur, prestanda och UltraFusion-teknologi]() Jun 25 2026
Jun 25 2026


relaterade produkter

C1608X7R1H334M080AC
CAP CER 0.33UF 50V X7R 0603

06035A680GAT4A
CAP CER 68PF 50V C0G/NP0 0603

AD5302BRM
IC DAC 8BIT V-OUT 10MSOP

TC427EOA
IC GATE DRVR LOW-SIDE 8SOIC

MCHC705JP7CDWE
IC MCU 8BIT 6KB OTP 28SOIC

PIC24FJ128GA310-I/PF
IC MCU 16BIT 128KB FLASH 100TQFP

RT9712AGF
IC PWR SWITCH N-CHAN 1:1 8MSOP

PM50CL1AN120
IGBT Modules

VI-ARM-C12
AC/DC CONVERTER 750W

AT83C5122A-CL
AT83C5122A-CL ATMEL

IDT72V255LA15PF
IDT72V255LA15PF IDT

TPSM84205EAB
DC DC CONVERTER 5V

CM060818
JABIL SMD